programming-in-emu8086___with-brief-theory
This project is maintained by MahediKamal
Contents
- Input
- Output
- Jump
- Loop
- Flag resister
- Variable
- Multiplication and Division
- Stack
- Procedure
- Array
- String
programming in emu8086 (with brief theory)
Hopefully, we all know the basic architecture of 8086. We will also briefly discuss it along with the sample code. Let’s start ☺
👉This is not case sensitive language. So int and INT seems equivalent to it.
👉To comment in code we have to put ( ; )
Take a single input💦
⚠️Do you know?:
👉We have 4 types of data resister- AX, BX, CX, DX. In 8086 each of them is 16-bit. Again we divide 16-bit into two 8 bit. Like AX = AL+ AH ( 16 = 8 + 8).
Steps to take single input -
💣Set the value of ah(AH) to 1. For this, we have to write-
mov ah,1
💣Give the command to execute. When we have 1 in ah and instruct to execute then it will take input and the default input location is al.
For this we have to write-
int 21h ; command to execute
## code-
.model small
.stack 100h
.data
.code
main proc
mov ah,1; Just focus on these two lines, else are just a structure,
int 21h ; else are like #include and main() in C you can think off now
main endp
end main
Give output💦
⚠️Do you know? How physical memory address is calculated?
👉In 8086 physical address is 20 bit. From the logical address of segment address and offset address we calculate the physical address. If,
segment address = 213A & offset address = 31B1, then physical address = 213A0 + 31B1.
What will happen if we get more than 20 number after addition? (https://stackoverflow.com/questions/6718783/calculation-of-physical-address-in-8086)
Steps to print output -
💣Set the value of ah(AH) to 2. For this, we have to write- mov ah,2
💣What we want to print, move that value in dl. dl is the default location to print output.
💣Give the command to execute. When we have 2 in ah and instruct to execute then it will give output and the default location from which output will come in dl.
For this, we have to write- int 21h ; command to execute
code-
.model small
.stack 100h
.data
.code
main proc
mov ah,1 ;prepqring ah to take input in al
int 21h ;execute command. By this command code will take input
; and will store that in al,as ah is now 1
mov ah,2 ;preparing ah to print from dl
mov dl,al ;assaigning value of al in dl
int 21h ;exexute command. By this command output will be
;printed from dl, as ah is now 2
main endp
end main
In the above code, input and Output is printed in the same line. Let’s print output in a new line-
.model small
.stack 100h
.data
.code
main proc
mov ah,1 ;prepqring ah to take input in al
int 21h ;execute command. By this command code will take input
; and will store that in al,as ah is now 1
mov bl,al ;moving the input value in bl.
mov ah,2 ;preparing ah to print from dl
mov dl,0dh ;0dh is carriage return
int 21h ;as al=2, execute command will print from dl
;as dl=0dh, it will move the cursor to left
mov ah,2 ;preparing ah to print from dl
mov dl,0ah ;0ah is carriage return.
int 21h ;as al=2, execute command will print from dl
;as dl=0ah, it will move the cursor to new line
mov ah,2 ;preparing ah to print from dl
mov dl,bl ;assaigning value of bl in dl
int 21h ;exexute command. By this command output will be
;printed from dl, as ah is now 2
main endp
end main
In line 15 we have set the value of ah to 2, so until we again set it to 1 it will continue to take input. That means line 21 & 27 is not needed.
Let’s print the string💦(coming ….)
Do you know? The types of data resister? ………… (comming)
Condition and Jump💦
👉First, we will see the unconditional jump
👉Then different types of conditional jump
unconditional jump -
💣If you are familiar with C, then you can compare jump with goto
💣jmp keyword is used to make a jump
💣the syntax is jmp label_name
💣after seeing jmp program will jump to the label where we defined it
In the below code we will take 2 input, and will write code to print both inputs. But before that, we will write an unconditional jump statement which will jump to a label without printing one input and print the next one. So, the code will show one output.
code-
.model small
.stack 100h
.data
.code
main proc
;first input
mov ah, 1 ; preparing ah to take input in al
int 21h
mov bl, al
;going to new line
mov ah, 2 ; preparing ah to print from dl
mov dl, 0dh ;0dh is carriage return
int 21h
mov dl, 0ah ; 0ah is line feed
int 21h
;second input
mov ah, 1 ; preparing ah to take input in al
int 21h
mov bh, al
jmp label_x ; instruction to jump to label_x
;going to new line
mov ah, 2 ; preparing ah to print from dl
mov dl, 0dh ;0dh is carriage return
int 21h
mov dl, 0ah ; 0ah is line feed
int 21h
mov ah, 2 ; preparing ah to print from dl
mov dl, bh
int 21h
label_x:
;going to new line
mov ah, 2 ; preparing ah to print from dl
mov dl, 0dh ;0dh is carriage return
int 21h
mov dl, 0ah ; 0ah is line feed
int 21h
mov ah, 2 ; preparing ah to print from dl
mov dl, bl
int 21h
main endp
end main
If we give 2 & 5 input to the program, the program will print 2. But without using jump the output would be 5 & 2.
This is an unconditional jump. No condition will be checked, as soon as the line ‘jump label_x’ is executed program makes a jump.
conditional jump -
We can classify jump condition on the basis of the signed number and unsigned number.
For signed number, we use : jl jg jle jge je jnl jng jnle jnge
For unsigned number, we use: ja jb jbe jae je jnb jna jnbe jnae
je is common for both signed and unsigned number.
Meanings of these key-words-
- jl => jump if less
- jg => jump if greater
- jle => jump if less or equal
- jge => jmp if greater or equal
- jnl => jump if not equal
- je => jump if equal
- ja => jump if above
- jb => jump if below
- jbe => jump if below or equal
- jnbe => jump if nor=t below or equal
- jnae => jump if not avobe or equal
etc….
Difference between signed jump condition and unsigned jump condition:
We know in emu8086 we can have 8 bit or 16-bit number. For simplicity let’s consider we have only 8-bit number. Then if we want to consider the signed number then the 8th bit will represent the sign(1=negative, 0=positive). If we consider the unsigned number then the 8th bit will be considered as a part of the value.
⚠️Let’s take a question: a = 71 h and b = 81 h ( h for hexadecimal), now which one is greater, a or b?
👉The answer is, we can’t say which one is greater until we know if we have to consider it as a signed or unsigned number. But why?
👉lets represent the hexadecimal number in binary :
a = 71 h = 0111 0001 b (we considered as 8-bit resister)
b = 81 h = 1000 0001 b
👉If we consider a and b as a signed number then, b is a negative number, as the 8-th bit is 1, so obviously b < a.
👉again, if we consider the unsigned number, then both of them are positive, and 8-th bit will contribute to the value. so b > a
👉If we consider the signed number then we must use the signed jump condition, if we just consider the value then we must use the unsigned jump condition
Note: for comparing to resister, the size of resister should be the same (we can't compare bx with cl)
Loop operation💦
Steps for using loop instruction -
💣loop instruction is directly related to cx resister. looping process will continue until the value of cx resister become 0.
💣First, we will set the value of cx resister to the number(say n) we want to loop.
💣Then we will declear a label and do some work under the label and then write the loop instruction. the work under the label will be perform n times.
Note: Loop will always integrate on the value of cx. If we put ch =0 and cl = any_8_bit_number, then the value is also equal to the value of cl.
About the flag register💦
 </br>
</br>
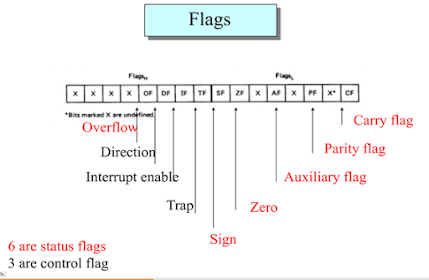
In emu8086, the flag register is of 16-bits, and it has 9 flags, other bits are undefined.
We can divide the 9 flags into 2 groups.
- Control flags (
TF, IF, DF) - Status flags (
CF, PF, AF, ZF, SF, OF)
First talk about the status flags-
Status flags are -
👉 CF = Carry Flag (If there is a carry from MSB or a borrow in MSB then CF will be 1. If we are doing arithmetic, then we will consider CF.)
👉 PF = Parity Flag (We will make odd parity. If in the lower 8-bit , number of 1 is even then Pf = 1)
👉 AF = Auxiliary Carry Flag (if there is a carry out from bit 3(4th bit from right) on addition, or there is a borrow into the bit 3 on subtraction, then AF = 1)
👉 ZF = Zero Flag (After operation if result is 0 then ZF = 1)
👉 SF = Sign Flag (If resultant MSB is 1 then SF =1 )
👉 OF = Overflow Flag (If signed overflow occur then OF = 1)
The most confusing flag if OF. Let’s simplify the condition for OF to be 1. We can think of two points. OF will be 1, if both the two points hold - (for addition)
- The MSB of both operand must be the same.
- MSB of the result will be the opposite of the operands.
Why these two points?
=> MSB is different means, one operand is positive and another is negative. By adding one positive with a negative, overflow can’t occur. Now if point 1 is fulfilled, then result MSB is different means that - adding two negative we have got positive or vice-versa, so then OF will be 1.
Try some exercise-
Ex-1:
ax = FFFF h and bx = 0001 h, now add ax and bx and say which types of overflow occurs. signed or unsigned?
=>
FFFF h = 1111 1111 1111 1111 b
0001 h = 0000 0000 0000 0001 b
ax + bx = 1 0000 0000 0000 0000 b.
if we consider the two points mentioned above, then we can easily say that no signed overflow has occurred. So OF = 0. But the is a carry out from the MSB, so CF = 1, which means unsigned overflow occurred.
Let’s think logically, why it is not signed overflow.
let, ax and bx are signed numbers, then MSB represents sign. MSB of ax is 1, so ax contains a negative number, on the other hand, MSB of bx is 0, so bx is a positive number. by adding a positive+negative no overflow can’t occur. So OF = 0;
Let, ax and bx are the unsigned numbers. SO MSB will also add to the value. And after adding the values there is a carry out, so unsigned overflow occurred. CF =1 .
Note: if we consider numbers as signed, then negative numbers are in the 2’s complement form.
EX-2:
ax = 7FFF h and bx = 7FFF h. add ax and bx and find the value of CF and OF.
=>
7FFF = 0111 1111 1111 1111
7FFF = 0111 1111 1111 1111
ax+bx = 1111 1111 1111 1110
considering the above two points, OF = 1
no carry out fro MSB so, CF = 0
EX-3:
ax = FFFF h and bx = FFFF h. add ax and bx and find the value of CF, OF, PF, AF, SF, ZF.
=>
ax = 1111 1111 1111 1111
bx = 1111 1111 1111 1111
ax+bx = 1 1111 1111 1111 1110
so,
CF = 1
OF = 0
PF = 0
AF = 1
SZ = 1
ZF = 0
EX-3:
ax = 8000 h. what will be the value of status resisters after doing the operation - neg ax ?
=>
Note: For negation operation, Thye value of CF is always 1 unless the result is 0.
ax = 80000 h = 10000 0000 0000 0000 b
negative numbers are stored i 2's complement form. 2's complement of ax is
ax = 1000 0000 0000 0000
1's complement = 0111 1111 1111 1111
0000 0000 0000 0001
2's complement = 1000 0000 0000 0000
So,
SF = 1 (MSB =1)
PF = 1 (number of 1 in last 8 bit is 0)
ZF = 0 (result is non zero)
CF = 1
OF = 1 (1's complement and 1 are positive(MSB 0), 2's complement is negative(MSB 1) )
About variable💦
👉db = 1 byte
👉dw = 2 byte
👉dd = 4 bute
👉dq = 8 byte
👉dt = 16 byte
Syntax : variable_name defien_derective(type) initial_value
Note: if we don’t want to initialize any value we can put a ? at that palace.
⚠️Do you know: We can’t compare between two variable, One must be a resister.
Steps for using variable -
💣First, we have to declare the variable in the data segment 💣to use the declared variable in the data code we have to write two lines-
mov ax,@data
mov ds,ax
more coming ……
Do multiplication and division💦
Note: One special use of ax and dx is multiplication and division.
Multiplication:
According to sign, there are two types of multiplication:
1) Signed multiplication (mul) 2)Unsigned multiplication (imul)
According to bit, there are two types of multiplication:
1) byte multiplication 2)word multiplication
Byte multiplication:
Both of the operands should be a byte (8-bit). al is the default operand, and another one can be any 8-bit register or variable.
Syntax: mul source (here the source is any 8-bit register or variable)
This is equivalent as: ax = al * source. So after multiplying 2 8-bit number result is stored in a 16-bit register, which is ax.
Word multiplication:
Both of the operands should be a word (16-bit). ax is the default operand, and another one can be any 16-bit register or variable.
Syntax: mul source (here the source is any 16-bit register or variable)
This is equivalent as: dx:ax = ax * source. So after multiplying 2 16-bit number result is stored in a two 16-bit register: dx and ax. Higher 16 bit (MSB) of result is saved in dx, and lower 16-bit (LSB) is saved in ax.
Difference between signed and unsigned multiplication:
Word multiplication:
Let ax = FFFF h, bx = FFFF h
Unsigned: (mul is used for unsigned multiplication)
mul bx
is equivalent to dx : ax = ax * bx
here ax = bx = 1111 1111 1111 1111 in binary = 65535 in decimal
so, dx:ax = ax * bx = 4294836225 in decimal = FFFE0001 in hexadecimal
so, dx = FFFE h and ax = 0001 h
Signed: (imul is used for unsigned multiplication)
imul bx
is equivalent to dx : ax = ax * bx
here ax = bx = 1111 1111 1111 1111 in binary ; which is in 2's complement. If we consider signed value
0000 0000 0000 0000
+1
0000 0000 0000 0001
so, ax = bx = -1 in decimal
so, dx:ax = ax * ax = 1 in decimal = 00000001 in hexadecimal
so, dx = 0000 h and ax = 0001 h
Byte multiplication:
Let’s see the flag resister change for multiplication:
Division:
Byte division:
syntax: div dividend (dividend is 8-bit resister od variable)
It is equivalent to: ax / dividend (remainder = ah, quotient = al)
Word division
syntax: div dividend (dividend is 16-bit resister od variable)
It is equivalent to: dx:ax / dividend (remainder = dx, quotient = ax)
About stack💦
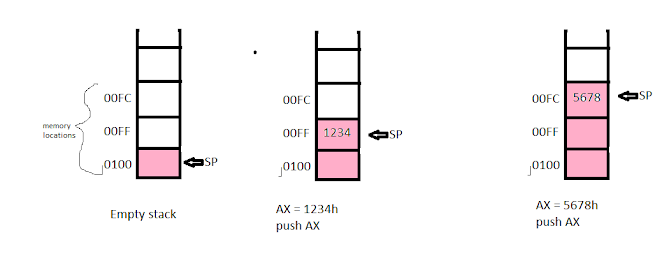
When we write ` .stack 100h program reserves 100 bytes for the stack. <br>
We represent stack memory as SS:SP <br>
SS = Stack segment (hold the beginning address of stack) <br>
SP = Stack pointer` (hold the address of the top of the stack. this is a 16-bit register)
PUSH:
Syntax: PUSH source
Here the source is a 16-bit resister (ax,bx etc.) or 16-bit memory variable.
We can also push the flag resister into the stack as it is a 16-bit register. For this we have to write: PUSHF
When we use push-
- SP is decremented by 2
- Source value will be stack at the position of SP
Visualization of push:
 </br>
</br>
POP:
Syntax: POP destination
Here the destination is a 16-bit register or a 16-bit variable. so poped element will be stored into the destination.
We can also flag resister as the destination for pop. Syntax is POPF
If the stack is empty then SP = 0100h
About the procedure💦
Syntax:
Procedure_name proc type
; body
ret
Procedure_name endp
- Here type can be of two types:
nearandfar. Bydefaultit isnear, It is not mandatory to specify the type.
When we use near and call a procedure from main then main procedure and the called procedure are in the same segment(.code segment). Otherwise, they are in a different segment.
ret: If we don’t write this after the execution program will not come back from where it was called. it will just normally go to the next line.
Note: If we write ret in the main procedure then it will create an infinity loop.
we can also use a number after ret: that is, if we write ret 4 then first it will pop the stack top then it will also pop (4/2) = 2 word from the stack.
How the procedure works:
When we call a procedure from the n-th line then the address of the n+1 th line is pushed into the stack. When the program finds ret, it pops the top of the stack and save it to IP.
So, if we push something into stack inside procedure then we must pop them before writing ret, otherwise program will not be able to get back to the n+1 th line.
3 common ways to pass parameters in the procedure:
- Through resister
- Through the global variable
- Through stack
About array💦
We can have two types of array
1) Array of words(dw) 2) Array of byte(db)
Syntax:
Array of words of 5 elements and value is initialized-
array_name dw 10, 20, 'a', 4, 'v'
Array of bytes of 4 elements and value is uninitialized-
array_name db ?, ?, ?, ?
Array of words of 40 elements and value is uninitialized(created using the keyword dup ) -
array_name dw 40 dup(?)
How dup works with example-
👉 Let’s find the meaning of 4,5,3 dup(2,3 dup(0), 1)
4, 5, 3 `dup(2, 3 dup(0), 1)`
=4, 5, `2, 3 dup(0), 1`, `2, 3 dup(0), 1`, `2, 3 dup(0), 1`
=4, 5, 2, `3 dup(0)`, 1, 2, `3 dup(0)`, 1, 2, `3 dup(0)`, 1
=4, 5, 2, `0, 0, 0`, 1, 2, `0, 0, 0`, 1, 2, `0, 0, 0`
👉 Do you know data segment can use maximum 64kb
For unsing array we need to know about addressing modes
Types of addressing modes-
- (1) register mode (Ex- MOV Ax, BX; here both are resisters)
- (2) immediate mode (Ex- MOV Ax, 1; here one is constant)
- (3) direct mode (Ex- MOV Ax, c; here c is a variable)
- (4) register inderect (Ex- MOV Ax, [SI]; here [SI] is the value where SI points)
- (5) based/indexed addressing mode (Ex- MOV Ax, arr[bx]; here arr[bx] means arr+bx)
To understand 4 and 5 addressing mode we need to know about segment and offset resister-
We divide the memory into different segments (code segment, data segment, stack segment) and to identify a location uniquely
in a segment we use offset. So to indicate a memory we need the value of both segment and offset.
If we write MOV Ax, [SI], then SI is the offset here but what will be the segment?
=> The answer is, for each offset register a segment is fixed. If we use the resister SI, then it will automatically use
DS (data segment) as the segment.
Offset resister is also fixed, we can’t use every resister ar the offset.
-
So for which offset register, which segment is going to be used-
Segment offset register ---------------- --------------- Data segment(DS) BX, SI, DI Stack segment BP Code segment IP (we are not going to use this)
So when we write MOV Ax, arr[bx], segment will be data segment as bx is used. And offset address is arr+bx.
👉 If we want an offset register(bx, si, or di) to point at the beginning of an array then we have to write LEA SI, arr_name.
⚠️ What is the difference between based addressing mode and indexed addressing mode?
👉 When we use bx as offset resister the it is called based addressing mode. And when we use SI or DI it is called
indexed addressing mode.
Some representation style-
- 2[bx] = [bx+2]
- arr[bx+Si] = [arr+bx+Si]
- arr[bx][Si] = [arr+bx+Si]
Some example for better understanding-
- MOV Bx, [Bx] <-- Valid: Though both are `Bx`
- MOV Ax, [Ax] <-- Invalid: As `Ax` can't be use as an offset resister
- Inc [DI] <-- Valid
- MOV Ax, [Bx]2 <-- Valid: But it was invalid in old version. 2[bx] is valid in old version but [bs]2 was invalid
- MOV bx,[arr+Ax]<-- Invalid: As `Ax` can't be use as an offset resister
- MOV Ax, -2[Si] <-- Valid: -2[Si] = [Si - 2]
👉 For byte n-th element is at position n-1 in reative to starting index, and for word array that is 2(n-1)
About String💦
Fixed rules for string(operand are fixed for string operation)-
- SI register must point to the source string character.(If any source string)
- DI register must point to the destination string character.(If any destination string)
- If we are not using source or destination string then register can be only AX or al
For example
If we want to move any character for string s1 to string s2 then SI must point to the character of S1 and DI to S2.
If we want to compare between a register and string character, then resister must be AX or al.
Offcet and segment relation for string
segment offcet
------ ------
DS SI (for source)
ES DI (for destination)
befor using DS and ES segment we have to initialize them by three lines of code
MOV ax,@data
MOV ds,ax
MOV es,ax
-
Moving(copying) sigle byte(for byte array) or word(for word array) from str1 to str2-
💣 point
SIregister to the character we want to copy from str1
💣 PointDIresister to the position where we to copy in str2
💣 Then writeMOVSBfor byte string andMOVSWfor word string -
Load(copying) signle byte(for byte array) or word(for word array) from a string to resister-
💣 pointSIregister to the character we want to copy from str1
💣 Then writeLODSBfor byte string andLODSWfor word string
💣 ForLODSBcharacter will be copied toaland forLODSWcharacter will be copied toax -
Store(copying) signle byte(for byte array) or word(for word array) from a resister to string-
💣 pointDIregister to the character where we want to copy to str1
💣 Then writeSTOSBfor byte string andSTOSWfor word string
💣 ForSTOSBcharacter will be copied fromaland forSTOSWcharacter will be copied fromax -
Compare(comparing between strings) signle byte(for byte array) or word(for word array) of two string-
💣 pointDIandSIregister to the two characters of the two string
💣 Then writeCMPSBfor byte string andCMPSWfor word -
Scan(comparing between string and register) signle byte(for byte array) or word(for word array)-
💣 pointDIto the character of the string
💣 Then writeSCASBfor byte string andSCASWfor word string (this will compare between register(al or ax) and string)